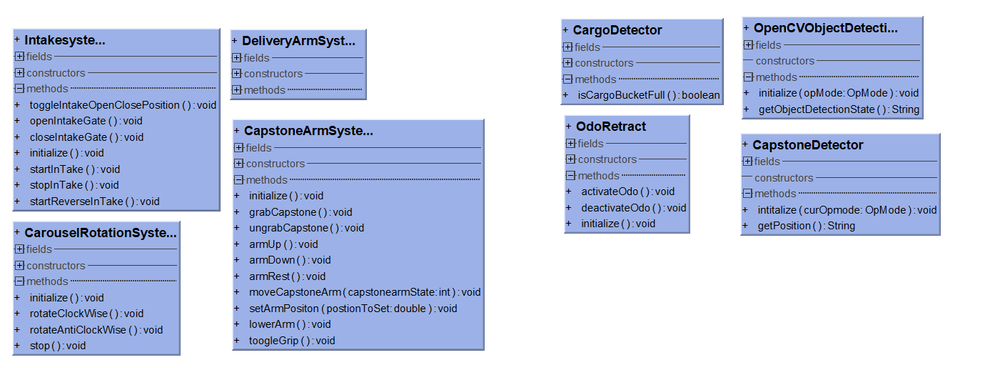

Outake System
Duck Spinner System
The Bucket Tool
Intake/Stop System
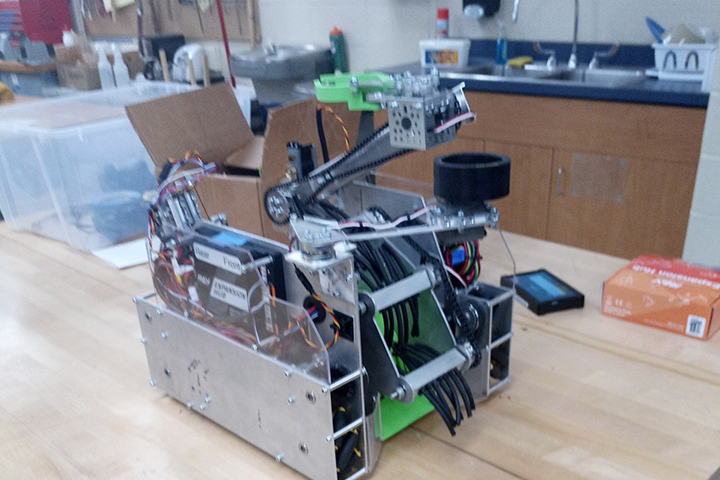
Capstone Arm
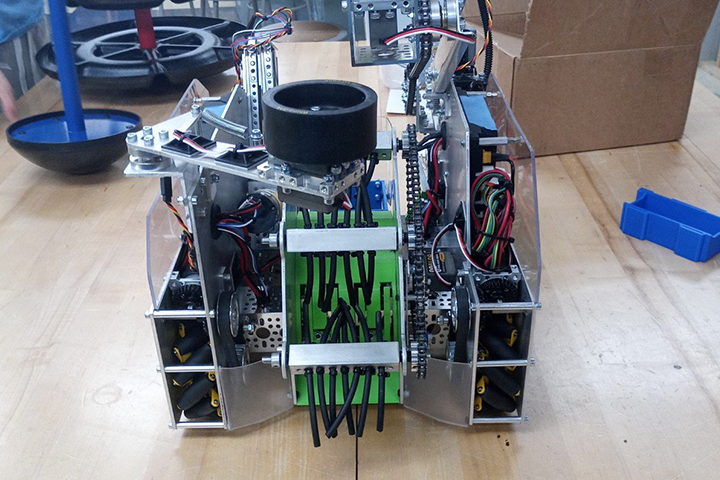
Other Robot Parts
Outake System

Duck Spinner System
The Bucket Tool

Intake/Stop System
Capstone Arm
Other Robot Parts